Stereo Vision: A New Dimension in Image Analysis
When we use our two eyes to look at the world around us, our brain is able to combine the two slightly different views from each eye to produce three dimensional (3-D) perception. Having these three dimensions to work with is useful because we human beings are then able to make judgements about distances, angles, shapes and volumes.
The majority of machine vision algorithms work on 2-D cases. For industrial applications, there are many ways of obtaining three dimensional information about the world, e.g., using special purpose sensors like acoustics, radar, or laser range finders. Another commonly used technique called stereo vision, similar in concept to human binocular vision, is to use two cameras to obtain two images from which distance information can be obtained. Compared to the alternatives mentioned above, stereo vision has the advantage that it achieves the 3-D acquisition without energy emission or moving parts. For any particular application, the key issue in making stereo vision practical is to find the most suitable combination of algorithms that will provide reliable estimates of distance.
The way that machine stereo vision generates the third dimension is achieved by finding the same features in each of the two images, and then measuring the distances to objects containing these features by triangulation; that is, by intersecting the lines of sight from each camera to the object. Finding the same points or other kinds of features in two images such that the matched points are the same projections of a point in the scene is called matching and is the fundamental computational task underlying stereo vision. Matching objects at each pixel in the image leads to a distance map.
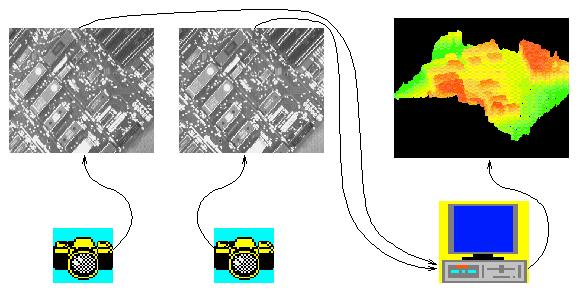
As shown in the figure, two images are obtained from the left and right cameras observing a common scene. This pair of stereo images allows us to obtain the 3-D information about the object. The example shown in the figure is a bent circuit board.
Once we have obtained a distance map of the scene, we can then measure the shape and volume of objects in the scene or even view them from virtual or imaginary camera angles. The models obtained can be output in various formats allowing integration with other applications.
Possible application areas of stereo vision are:
-
- industrial inspection (quality control, deformation analysis, food inspection, printed web defect analysis)
- 3-D sensing (three dimensional measurement of objects)
- autonomous vehicles
- medical, biomedical and bioengineering (stereoendoscopy, stereoradiographs, automatic creation of three dimensional model of a human face or dental structure from stereo images)
- scanning electron microscope
- surveillance (motion tracking and object tracking to measure paths)
- transport (traffic scene analysis)
- digital photogrammetry, remote sensing (generating Digital Elevation Models (DEM))
- stereolithography, stereosculpting (automatic acquisition of digital 3-D information used in CAD-CAM systems. This information can be fed into computer controlled milling machines for rapid solid modelling)
- C. Sun and S. Peleg, "Fast Panoramic Stereo Matching Using Cylindrical Maximum Surfaces". IEEE Transactions on Systems, Man and Cybernetics Part B, 2003. Accepted.
- C. Sun, "Uncalibrated Three-View Image Rectification". Image and Vision Computing, 21(3):259-269, March 2003.
- C. Sun. "Fast Stereo Matching Using Rectangular Subregioning and 3D Maximum-Surface Techniques". International Journal of Computer Vision. 47(1/2/3):99-117, May 2002.
- C. Sun, "Rectangular Subregioning and 3-D Maximum-Surface Techniques for Fast Stereo Matching" in IEEE Workshop on Stereo and Multi-Baseline Vision (in conjunction with CVPR'01), pp.44-53, December 9-10, 2001, Kauai, Hawaii, USA.
- C. Sun, "Multi-Resolution Stereo Matching Using Maximum-Surface Techniques" in Digital Image Computing: Techniques and Applications, Perth, Australia, 7-8 December 1999, pp.195-200.
- C. Sun, "A Fast Stereo Matching Method" in Digital Image Computing: Techniques and Applications, pp.95-100, Massey University, Auckland, New Zealand, 10-12 December 1997.